ROS学习Navigation(一)
这次不想从头开始写ROS学习的部分,基础的很多概念都是学习的 这本书,里面前面有很清楚的例子,也是围绕indigo这个版本来教学的,资料也非常多,做了一些简单的小bot。例如wander_bot, follow_bot等等。
但是对于坐标变换、图像处理、路径规划、地图导航等几个之后常用的方面还是了解甚少,所以特意把这几块的学习部分记录下来。
Setting up robot using tf
这里主要参考ros wiki上的 这篇文章。
Basic Concepts
TF主要用于有很多不同的frame,而各自处理坐标变换极为复杂的情况。对于如下的简单例子,
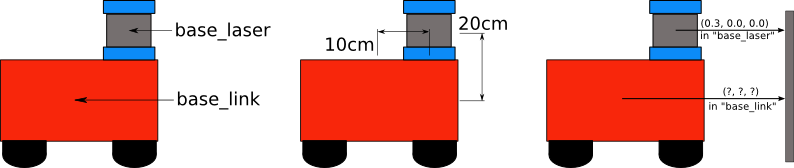
有两个frame,base_laser 和 base_link,TF用一个树结构来保证两个frame间的单向连接。

首先要确定何为父节点何为儿子节点,再确定连接的方向。
Writing codes
以base_link为父节点,我们将base_laser的数据转换到base_link上。首先创建一个package,使用 roscpp, tf 和 geometry_msgs.
$ cd %TOP_DIR_YOUR_CATKIN_WS%/src
$ catkin_create_pkg robot_setup_tf roscpp tf geometry_msgs
Broadcasting a Transform
接下来要创建一个node把 base_laser → base_link 的变换广播给ROS。
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher");
ros::NodeHandle n;
ros::Rate r(100);
tf::TransformBroadcaster broadcaster;
while(n.ok()){
broadcaster.sendTransform(
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
ros::Time::now(),"base_link", "base_laser"));
r.sleep();
}
}
The tf package provides an implementation of a tf::TransformBroadcaster to help make the task of publishing transforms easier. To use the TransformBroadcaster, we need to include the tf/transform_broadcaster.h header file.
Sending a transform with a TransformBroadcaster requires five arguments. First, we pass in the rotation transform, which is specified by a btQuaternion for any rotation that needs to occur between the two coordinate frames. In this case, we want to apply no rotation, so we send in a btQuaternion constructed from pitch, roll, and yaw values equal to zero. Second, a btVector3 for any translation that we’d like to apply. We do, however, want to apply a translation, so we create a btVector3 corresponding to the laser’s x offset of 10cm and z offset of 20cm from the robot base. Third, we need to give the transform being published a timestamp, we’ll just stamp it with ros::Time::now(). Fourth, we need to pass the name of the parent node of the link we’re creating, in this case “base_link.” Fifth, we need to pass the name of the child node of the link we’re creating, in this case “base_laser.”
Using a Transform
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>
void transformPoint(const tf::TransformListener& listener){
//we'll create a point in the base_laser frame that we'd like to transform to the base_link frame
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
We’ll create a function that, given a TransformListener, takes a point in the “base_laser” frame and transforms it to the “base_link” frame. This function will serve as a callback for the ros::Timer created in the main() of our program and will fire every second.
Here, we’ll create our point as a geometry_msgs::PointStamped. The “Stamped” on the end of the message name just means that it includes a header, allowing us to associate both a timestamp and a frame_id with the message. We’ll set the stamp field of the laser_point message to be ros::Time() which is a special time value that allows us to ask the TransformListener for the latest available transform. As for the frame_id field of the header, we’ll set that to be “base_laser” because we’re creating a point in the “base_laser” frame.
Now that we have the point in the “base_laser” frame we want to transform it into the “base_link” frame. To do this, we’ll use the TransformListener object, and call transformPoint() with three arguments: the name of the frame we want to transform the point to (“base_link” in our case), the point we’re transforming, and storage for the transformed point. So, after the call to transformPoint(), base_point holds the same information as laser_point did before only now in the “base_link” frame.
Build code
Now that we’ve written our little example, we need to build it. Open up the CMakeLists.txt file that is autogenerated by roscreate-pkg and add the following lines to the bottom of the file.
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
add_executable(tf_listener src/tf_listener.cpp)
target_link_libraries(tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(tf_listener ${catkin_LIBRARIES})