ROS学习Navigation(二)
紧接着上一篇继续实现第二部分。
Setup and Configuration of the Navigation Stack on a Robot
在学习了基础的TF知识后,可以开始逐步学习如何publish tf的数据,Odometry的数据,sensor的数据,以及基础的navigation的设置。官方网站上写明了一个基础的navigation的tuning方法的教程,其中的cost map和Local Planer的部分是讲得稍微深入具体一些的,还没有完全看懂,但是相信日后会比较有参考价值。
首先来看一个整体的设计图,这个图非常的高层抽象,是很好的理解材料
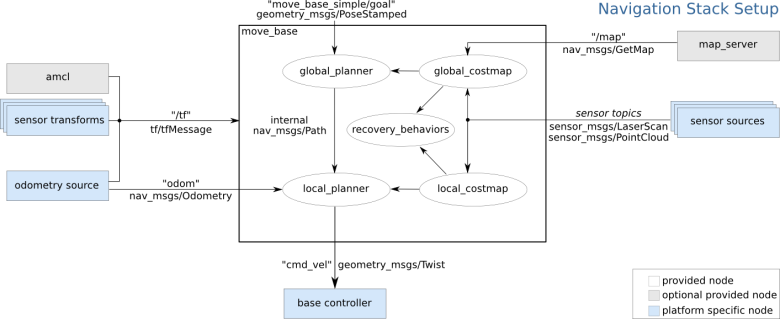
白色的框是已经被实现的必须的部分,灰色的已经被实现的可选部分,蓝色的是需要对不同机器人设计的部分。
1. Setup
- 首先需要完成TF transform information 信息的发布,这个在前一大节已经讲解。
- 机器人在世界中的导航是需要获取传感器信息来避障的,所以ROS假设这些信息是通过
sensor_msgs/LaserScan或sensor_msgs/PointCloud来接收的。Publishing Sensor Streams Over ROS - Odometry信息需要通过
tf和nav_msgs/Odometry来发布。这里是有相关的教程的。 - Base Controller (base controller)。速度的指令是通过
geometry_msgs/Twistmessage来传递给cmd_veltopic的。使用的frame是base coordinate frame。 - Mapping (map_server) navigation本身是不需要map的,但是可以在 building a map 来创建一个运行环境的map。
2. Navigation Stack Setup
至此,已经通过tf publish了坐标系frame,可以接收到sensor_msgs/LaserScan 或 sensor_msgs/PointCloud的sensor信息,使用了tf和nav_msgs/Odometry发布了Odometry信息,同时接收了速度的命令。如果有任何一条未能满足,需要先完成上述的Setup部分。
2.1 创建package
这个package要依赖于前面的所有package以及包含navigation stack高层接口 move_base package。
catkin_create_pkg my_robot_name_2dnav roscpp move_base my_tf_configuration_dep my_odom_configuration_dep my_sensor_configuration_dep
my_tf_configuration_dep 包括tf和 geometry_msgs
my_odom_configuration_dep 包括